Laserkauguse mõõtmise moodulid on ülitäpsed tööriistad, mida kasutatakse laialdaselt sellistes valdkondades nagu autonoomne juhtimine, droonid, tööstusautomaatika ja robootika. Nende moodulite tööpõhimõte hõlmab tavaliselt laserkiire kiirgamist ja objekti ning anduri vahelise kauguse mõõtmist peegeldunud valguse vastuvõtmise teel. Laserkauguse mõõtmise moodulite erinevate jõudlusparameetrite hulgas on kiire hajumine oluline tegur, mis mõjutab otseselt mõõtmise täpsust, mõõteulatust ja rakendusstsenaariumide valikut.
1. Kiire hajumise põhikontseptsioon
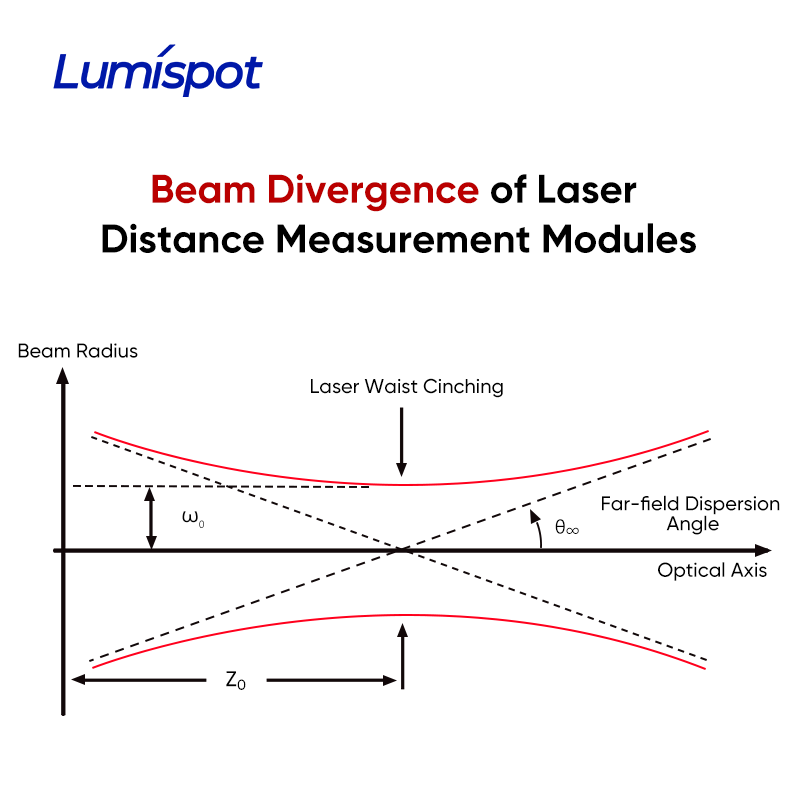
Kiire hajumine viitab nurgale, mille võrra laserkiire ristlõige suureneb, kui see laserkiirgusest kaugemale liigub. Lihtsamalt öeldes, mida väiksem on kiire hajumine, seda kontsentreeritumaks laserkiir levimise ajal jääb; vastupidi, mida suurem on kiire hajumine, seda laiemalt kiir levib. Praktikas väljendatakse kiire hajumist tavaliselt nurkades (kraadides või milliradiaanides).
Laserkiire hajumine määrab, kui palju see teatud kaugusele levib, mis omakorda mõjutab sihtmärgil oleva täpi suurust. Kui hajumine on liiga suur, katab kiir pikkadel vahemaadel suurema ala, mis võib vähendada mõõtmise täpsust. Teisest küljest, kui hajumine on liiga väike, võib kiir pikkadel vahemaadel liiga fokusseeruda, mistõttu on selle nõuetekohane peegeldamine keeruline või isegi peegeldunud signaali vastuvõtmine takistatud. Seetõttu on sobiva kiire hajumise valimine laserkauguse mõõtmise mooduli täpsuse ja rakendusala jaoks ülioluline.
2. Kiire hajumise mõju laserkauguse mõõtmise mooduli jõudlusele
Kiire hajumine mõjutab otseselt laserkaugusmooduli mõõtmistäpsust. Suurem kiire hajumine põhjustab suurema täpi suuruse, mis võib viia hajutatud peegeldunud valguse ja ebatäpsete mõõtmisteni. Pikemate vahemaade korral võib suurem täpi suurus nõrgendada peegeldunud valgust, mõjutades anduri poolt vastuvõetava signaali kvaliteeti ja suurendades seega mõõtmisvigu. Seevastu väiksem kiire hajumine hoiab laserkiire pikemate vahemaade tagant fokuseerituna, mille tulemuseks on väiksem täpi suurus ja seega suurem mõõtmistäpsus. Suurt täpsust nõudvate rakenduste, näiteks laserskaneerimise ja täpse lokaliseerimise puhul on üldiselt eelistatud valik väiksem kiire hajumine.
Kiire hajumine on samuti tihedalt seotud mõõteulatusega. Suure kiire hajumisega laserkaugusmoodulite puhul levib laserkiir kiiresti pikkade vahemaade taha, nõrgendades peegeldunud signaali ja piirates lõpuks efektiivset mõõteulatust. Lisaks võib suurem täpi suurus põhjustada peegeldunud valguse tulekut mitmest suunast, mistõttu on anduril raske sihtmärgilt signaali täpselt vastu võtta, mis omakorda mõjutab mõõtmistulemusi.
Teisest küljest aitab väiksem kiire hajumine laserkiirel kontsentreeritud püsida, tagades tugeva peegeldunud valguse ja laiendades seeläbi efektiivset mõõteulatust. Seega, mida väiksem on laserkauguse mõõtmise mooduli kiire hajumine, seda kaugemale ulatub tavaliselt efektiivne mõõteulatus.
Kiire hajuvuse valik on tihedalt seotud ka laserkauguse mõõtmise mooduli rakendusstsenaariumiga. Stsenaariumide puhul, mis nõuavad pikamaa- ja suure täpsusega mõõtmisi (näiteks takistuste tuvastamine autonoomses sõidus, LiDAR), valitakse tavaliselt väikese kiire hajuvusega moodul, et tagada täpsed mõõtmised pikkadel vahemaadel.
Lühikese vahemaa mõõtmiste, skaneerimise või mõnede tööstusautomaatikasüsteemide puhul võib olla eelistatud suurema kiire hajuvusega moodul, et suurendada katvusala ja parandada mõõtmise efektiivsust.
Kiire hajuvust mõjutavad ka keskkonnatingimused. Keerulistes keskkondades, kus on tugevad peegeldusomadused (näiteks tööstuslikud tootmisliinid või hoonete skaneerimine), võib laserkiire levik mõjutada valguse peegeldumist ja vastuvõtmist. Sellistel juhtudel võib suurem kiire hajuvus aidata katta suuremat ala, suurendada vastuvõetava signaali tugevust ja vähendada keskkonnamõjusid. Teisest küljest võib selges ja takistusteta keskkonnas väiksem kiire hajuvus aidata mõõtmist sihtmärgile suunata, minimeerides seeläbi vigu.
3. Kiire hajumise valik ja disain
Laserkauguse mõõtmise mooduli kiire hajumine määratakse tavaliselt laserkiirgaja konstruktsiooni järgi. Erinevad rakendusstsenaariumid ja nõuded tingivad kiire hajumise konstruktsiooni variatsioone. Allpool on toodud mitu levinud rakendusstsenaariumi ja nendega seotud kiire hajumise valikuid:
- Ülitäpne ja pikamaa mõõtmine:
Rakenduste puhul, mis nõuavad nii suurt täpsust kui ka pikki mõõtmisvahemaid (näiteks täppismõõtmised, LiDAR ja autonoomne juhtimine), valitakse üldiselt väiksem kiire hajuvus. See tagab, et laserkiir säilitab pikemate vahemaade korral väikese täpi suuruse, suurendades nii mõõtmise täpsust kui ka ulatust. Näiteks autonoomse juhtimise puhul hoitakse LiDAR-süsteemide kiire hajuvust tavaliselt alla 1°, et kaugemaid takistusi täpselt tuvastada.
- Suur katvus madalamate täpsusnõuetega:
Juhtudel, kus on vaja suuremat katvusala, kuid täpsus pole nii oluline (näiteks roboti lokaliseerimine ja keskkonna skaneerimine), valitakse tavaliselt suurem kiire hajuvus. See võimaldab laserkiirel katta laiemat ala, parandades seadme tundlikkust ja muutes selle sobivaks kiireks skaneerimiseks või suure ala tuvastamiseks.
- Lühikese vahemaa mõõtmine siseruumides:
Siseruumides või lühikese ulatusega mõõtmiste puhul aitab suurem kiire hajuvus suurendada laserkiire ulatust, vähendades ebaõigetest peegeldusnurkadest tingitud mõõtmisvigu. Sellistel juhtudel võib suurem kiire hajuvus tagada stabiilsed mõõtmistulemused, suurendades täpi suurust.
4. Kokkuvõte
Kiire hajumine on üks peamisi tegureid, mis mõjutab laserkauguse mõõtmise moodulite jõudlust. See mõjutab otseselt mõõtmise täpsust, mõõteulatust ja rakendusstsenaariumide valikut. Kiire hajumise õige disain võib parandada laserkauguse mõõtmise mooduli üldist jõudlust, tagades selle stabiilsuse ja tõhususe erinevates rakendustes. Kuna laserkauguse mõõtmise tehnoloogia areneb pidevalt, saab kiire hajumise optimeerimisest oluline tegur nende moodulite rakendusala ja mõõtmisvõimaluste laiendamisel.
Lumispot
Aadress: Hoone 4 #, nr 99 Furongi 3. tee, Xishani piirkond, Wuxi, 214000, Hiina
Tel: + 86-0510 87381808.
Mobiil: + 86-15072320922
Email: sales@lumispot.cn
Postituse aeg: 18. november 2024