Liitu meie sotsiaalmeediaga, et saada kiireid postitusi
Murranguliste tehnoloogiliste edusammude ajastul kerkisid navigatsioonisüsteemid esile kui alustalad, mis viisid arvukate edusammudeni, eriti täppiskriitilistes sektorites. Teekond algelisest taevakehade navigatsioonist keerukate inertsiaalsete navigatsioonisüsteemideni (INS) on kehastus inimkonna vankumatutest püüdlustest uurimistöö ja ülitäpse tulemuse poole. See analüüs süveneb INS-i keerukasse mehaanikasse, uurides tipptasemel kiudoptiliste güroskoopide (FOG) tehnoloogiat ja polarisatsiooni keskset rolli kiudsilmuste säilitamisel.
1. osa: Inertsiaalsete navigatsioonisüsteemide (INS) dešifreerimine:
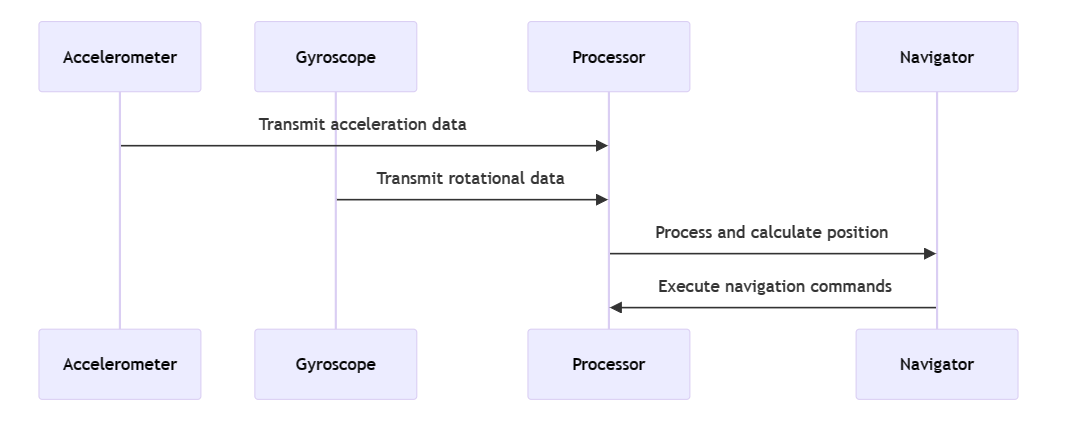
Inertsiaalsed navigatsioonisüsteemid (INS) on autonoomsed navigatsioonivahendid, mis arvutavad täpselt sõiduki asukohta, suunda ja kiirust, sõltumatult välistest signaalidest. Need süsteemid ühtlustavad liikumis- ja pöörlemisandureid, integreerudes sujuvalt algkiiruse, asukoha ja suuna arvutusmudelitega.
Arhetüüpne INS hõlmab kolme peamist komponenti:
· Kiirendusmõõturid: need olulised elemendid registreerivad sõiduki lineaarkiirendust, teisendades liikumise mõõdetavateks andmeteks.
· Güroskoobid: Need komponendid on nurkkiiruse määramise lahutamatud osad ja on süsteemi orienteerimisel kesksel kohal.
· Arvutimoodul: INS-i närvikeskus, mis töötleb mitmetahulisi andmeid reaalajas asukohaanalüüsi saamiseks.
INS-i immuunsus väliste häirete suhtes muudab selle kaitsesektoris asendamatuks. Siiski maadleb see „triiviga“ – täpsuse järkjärgulise langusega, mis nõuab keerukaid lahendusi, näiteks andurite liitmist vigade vähendamiseks (Chatfield, 1997).
2. osa. Kiudoptilise güroskoobi töödünaamika:
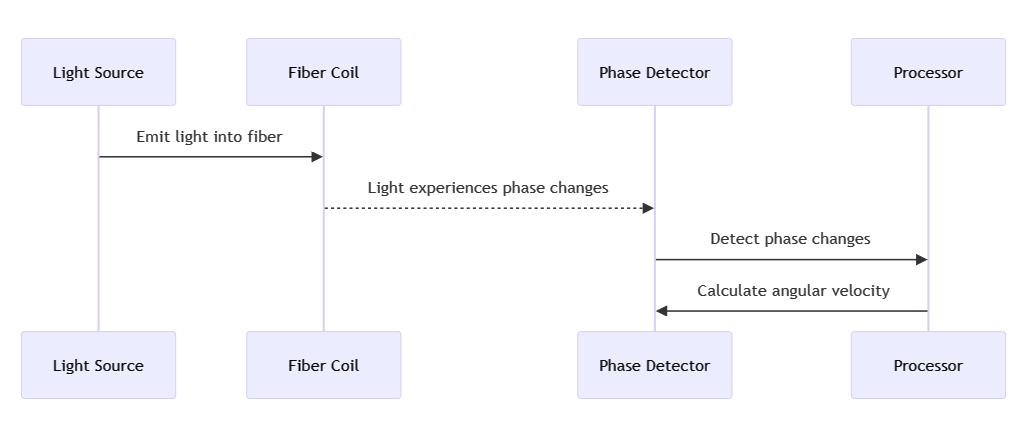
Kiudoptilised güroskoobid (FOG-id) kuulutavad pöördeandurite murrangulist ajastut, kasutades ära valguse interferentsi. Täppiskeskse FOG-i keskmes on kosmosesõidukite stabiliseerimine ja navigeerimine.
FOG-id toimivad Sagnaci efekti põhjal, kus pöörleva kiudmähise vastassuundades liikuv valgus põhjustab faasinihke, mis on korrelatsioonis pöörlemiskiiruse muutustega. See nüansirikas mehhanism annab täpseid nurkkiiruse mõõdikuid.
Olulised komponendid hõlmavad järgmist:
· Valgusallikas: Koherentset valguse teekonda algatav alguspunkt, tavaliselt laser.
· KiudmähisSpiraalne optiline kanal pikendab valguse trajektoori, võimendades seeläbi Sagnaci efekti.
· Fotodetektor: see komponent eristab valguse keerulisi interferentsimustreid.
3. osa: Polarisatsiooni olulisus kiudsilmuste säilitamisel:
Polarisatsiooni säilitavad (PM) kiudsilmused, mis on FOG-ide jaoks üliolulised, tagavad valguse ühtlase polarisatsiooni, mis on interferentsimustri täpsuse peamine määraja. Need spetsiaalsed kiud, mis võidavad polarisatsioonirežiimi hajumist, suurendavad FOG-ide tundlikkust ja andmete autentsust (Kersey, 1996).
PM-kiudude valik, mille dikteerivad operatiivsed vajadused, füüsilised omadused ja süsteemne harmoonia, mõjutab üldisi jõudlusnäitajaid.
4. osa: Rakendused ja empiirilised tõendid:
FOGid ja INS-id leiavad resonantsi väga erinevates rakendustes, alates mehitamata õhuretkede orkestreerimisest kuni kinematograafilise stabiilsuse tagamiseni keskkonna ettearvamatus olukorras. Nende usaldusväärsuse tunnistuseks on nende kasutamine NASA Marsi kulgurites, mis hõlbustab tõrkekindlat maavälist navigatsiooni (Maimone, Cheng ja Matthies, 2007).
Turutrajektoorid ennustavad nende tehnoloogiate jaoks kiiresti kasvavat nišši, kus uurimisvektorid on suunatud süsteemi vastupidavuse, täpsusmaatriksite ja kohanemisvõime spektrite tugevdamisele (MarketsandMarkets, 2020).

Rõngaslasergüroskoop
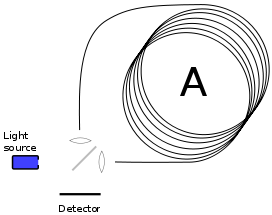
Sagnaci efektil põhineva kiudoptilise güroskoobi skeem
Viited:
- Chatfield, Alberta, 1997.Suure täpsusega inertsiaalse navigatsiooni alused.Astronautika ja aeronautika arendus, kd 174. Reston, Virginia: Ameerika Aeronautika ja Astronautika Instituut.
- Kersey, AD jt, 1996. "Kiudoptilised güroskoobid: 20 aastat tehnoloogia arengut", teosesIEEE toimetised,84(12), lk 1830–1834.
- Maimone, MW, Cheng, Y. ja Matthies, L., 2007. "Visuaalne odomeetria Marsi uurimiskulguritel – tööriist täpse sõidu- ja teaduspildistamise tagamiseks"IEEE robootika ja automatiseerimise ajakiri,14(2), lk 54–62.
- MarketsandMarkets, 2020. "Inertsiaalsete navigatsioonisüsteemide turg klassi, tehnoloogia, rakenduse, komponendi ja piirkonna järgi – globaalne prognoos aastani 2025."
Lahtiütlus:
- Käesolevaga kinnitame, et teatud meie veebisaidil kuvatavad pildid on kogutud internetist ja Vikipeediast hariduse edendamise ja teabe jagamise eesmärgil. Austame kõigi algsete loojate intellektuaalomandi õigusi. Neid pilte kasutatakse ilma ärilise kasu saamise kavatsuseta.
- Kui usute, et mõni kasutatud sisu rikub teie autoriõigusi, võtke meiega ühendust. Oleme valmis võtma asjakohaseid meetmeid, sealhulgas piltide eemaldamise või õige viitamise, et tagada intellektuaalomandi seaduste ja määruste järgimine. Meie eesmärk on säilitada platvormi, mis on sisurikas, õiglane ja austab teiste intellektuaalomandi õigusi.
- Palun võtke meiega ühendust järgmise kontaktmeetodi kaudu,email: sales@lumispot.cnKohustume võtma viivitamatuid meetmeid mis tahes teate saamisel ja tagame 100% koostöö selliste probleemide lahendamisel.
Postituse aeg: 18. okt 2023