
Kiire postituse saamiseks tellige meie sotsiaalmeedia
Murranguliste tehnoloogiliste edusammude ajastul kujunesid navigatsioonisüsteemid alustalaks, mis tõi kaasa arvukaid edusamme, eriti täppiskriitilistes sektorites.Teekond algelisest taevanavigatsioonist keerukate inertsiaalsete navigatsioonisüsteemideni (INS) kehastab inimkonna järeleandmatuid püüdlusi uurida ja saavutada täpset täpsust.See analüüs süveneb sügavale INS-i keerukasse mehaanikasse, uurides fiiberoptiliste güroskoopide (FOG) tipptehnoloogiat ja polarisatsiooni keskset rolli kiudahelate säilitamisel.
Osa 1: Inertsiaalsete navigatsioonisüsteemide (INS) dešifreerimine:
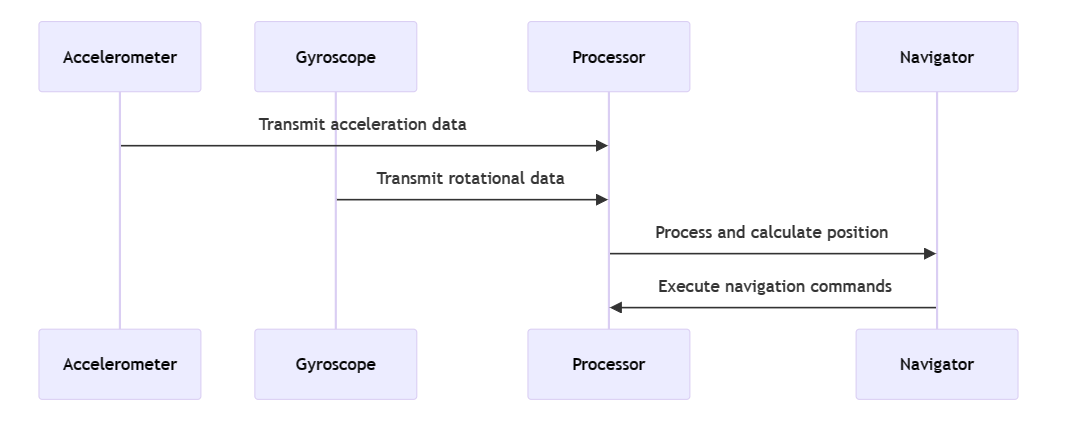
Inertsiaalsed navigatsioonisüsteemid (INS) paistavad silma autonoomsete navigatsioonivahenditena, mis arvutavad täpselt välja sõiduki asukoha, orientatsiooni ja kiiruse, sõltumata välistest näpunäidetest.Need süsteemid ühtlustavad liikumis- ja pöörlemisandureid, integreerudes sujuvalt algkiiruse, asukoha ja orientatsiooni arvutusmudelitega.
Arhetüüpne INS hõlmab kolme põhikomponenti:
· Kiirendusmõõturid: need olulised elemendid registreerivad sõiduki lineaarkiirenduse, muutes liikumise mõõdetavateks andmeteks.
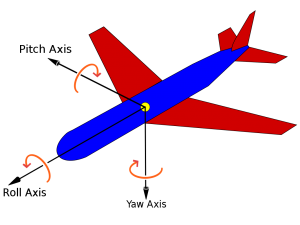
· Güroskoobid: integreeritud nurkkiiruse määramiseks, need komponendid on süsteemi orientatsiooni jaoks kesksed.
· Arvutimoodul: INS-i närvikeskus, mis töötleb mitmekülgseid andmeid, et saada reaalajas positsioonianalüüsi.
INS-i vastupidavus väliste häirete suhtes muudab selle kaitsesektorites asendamatuks.Siiski maadleb see „triiviga” – täpsuse järkjärgulise vähenemisega, mistõttu on vigade leevendamiseks vaja keerukaid lahendusi, nagu andurite liitmine (Chatfield, 1997).
Osa 2. Fiiberoptilise güroskoopi töödünaamika:
Fiiberoptilised güroskoobid (FOG-id) kuulutavad ümberkujundavat ajastut pöörlemistuvastuses, võimendades valguse häireid.Täpsuse keskmes on FOG-id kosmosesõidukite stabiliseerimiseks ja navigeerimiseks üliolulised.
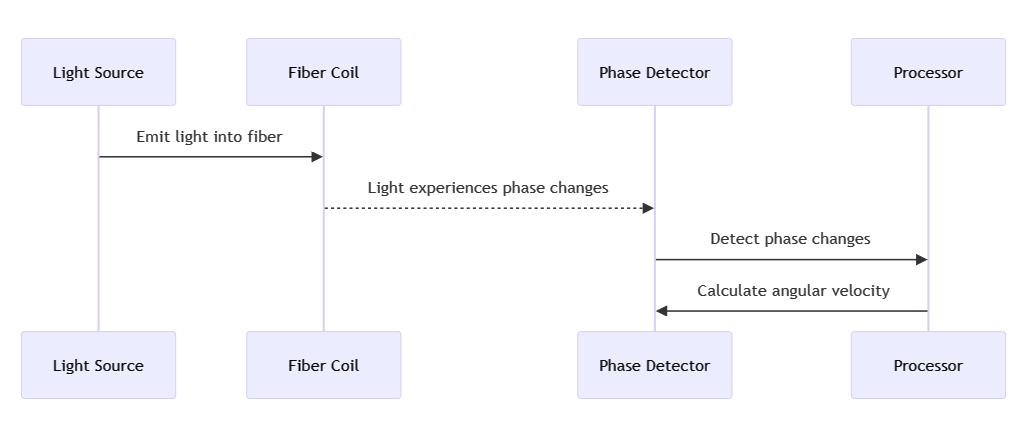
FOG-id töötavad Sagnaci efektil, kus pöörlevas kiumähises vastassuundades liikuv valgus näitab faasinihet, mis on korrelatsioonis pöörlemiskiiruse muutustega.See nüansirikas mehhanism tähendab täpset nurkkiiruse mõõdikut.
Olulised komponendid sisaldavad:
· Valgusallikas: alguspunkt, tavaliselt laser, mis algatab koherentse valguse teekonna.
· Fiber Coil: Keritud optiline kanal pikendab valguse trajektoori, võimendades seeläbi Sagnaci efekti.
· Fotodetektor: see komponent tuvastab valguse keerukad interferentsimustrid.
3. osa: polarisatsiooni tähtsus kiudahelate säilitamisel:
Polarisatsiooni säilitavad (PM) kiudahelad, mis on FOG-de jaoks olulised, tagavad valguse ühtlase polarisatsiooni oleku, mis on interferentsi mustri täpsuse võtmetegur.Need spetsiaalsed kiud, mis võitlevad polarisatsioonirežiimi hajutamise vastu, suurendavad FOG-i tundlikkust ja andmete autentsust (Kersey, 1996).
PM-kiudude valik, mis on tingitud töövajadustest, füüsilistest omadustest ja süsteemsest harmooniast, mõjutab üldisi jõudlusmõõdikuid.
4. osa: Rakendused ja empiirilised tõendid:
FOG-id ja INS-id leiavad resonantsi erinevates rakendustes, alates mehitamata õhurünnakute korraldamisest kuni filmilise stabiilsuse tagamiseni keset keskkonna ettearvamatust.Nende usaldusväärsuse tunnistuseks on nende kasutuselevõtt NASA Marsi kulgurites, mis hõlbustab tõrkekindlat maavälist navigeerimist (Maimone, Cheng ja Matthies, 2007).
Turu trajektoorid ennustavad nende tehnoloogiate kasvavat niši, mille uurimisvektorid on suunatud süsteemi vastupidavuse, täppismaatriksite ja kohanemisvõime spektrite tugevdamisele (MarketsandMarkets, 2020).

Rõngas lasergüroskoop
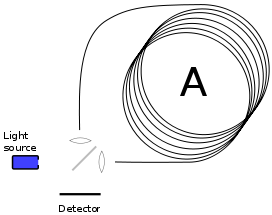
Fiiberoptilise güroskoopi skeem, mis põhineb sagnaci efektil
Viited:
- Chatfield, AB, 1997.Suure täpsusega inertsiaalse navigatsiooni alused.Progress in Astronautics and Aeronautics, Vol.174. Reston, VA: American Institute of Aeronautics and Astronautics.
- Kersey, AD et al., 1996. "Fiiberoptilised güroskoopid: 20 aastat tehnoloogia arengut"IEEE toimetised,84(12), lk 1830–1834.
- Maimone, MW, Cheng, Y. ja Matthies, L., 2007. "Visuaalne odomeetria Marsi uurimise kulguritel – tööriist täpse sõidu ja teadusliku pildistamise tagamiseks"IEEE Robotics & Automation Magazine,14(2), lk 54–62.
- MarketsandMarkets, 2020. "Inertsiaalsete navigatsioonisüsteemide turg astme, tehnoloogia, rakenduse, komponendi ja piirkonna järgi – globaalne prognoos aastani 2025."
Vastutusest loobumine:
- Käesolevaga kinnitame, et teatud meie veebisaidil kuvatavad pildid on kogutud Internetist ja Vikipeediast hariduse täiendamise ja teabe jagamise eesmärgil.Austame kõigi originaalsete loojate intellektuaalomandi õigusi.Neid pilte kasutatakse ärilise kasu saamise kavatsuseta.
- Kui arvate, et mis tahes kasutatud sisu rikub teie autoriõigusi, võtke meiega ühendust.Oleme rohkem kui valmis võtma asjakohaseid meetmeid, sealhulgas eemaldama kujutised või tagama õiged omistused, et tagada vastavus intellektuaalomandi seadustele ja määrustele.Meie eesmärk on säilitada platvorm, mis on sisult rikkalik, õiglane ja austav teiste intellektuaalomandi õigusi.
- Võtke meiega ühendust järgmisel kontaktimeetodil.email: sales@lumispot.cn.Kohustume iga teate saamisel viivitamatult tegutsema ja tagame 100% koostöö selliste probleemide lahendamisel.
Postitusaeg: 18.10.2023